Bürstenlose Servomotoren Info
Die Bezeichnung „Servo“ kommt aus der lateinischen Sprache (servus: Sklave, Diener) und bezieht sich auf die ursprüngliche Aufgabe eines Servomotors, nämlich Hilfs-bzw. Stellantriebe an Maschinen und Anlagen.
Die Ansteuerung eines Servomotors findet in einem geschlossenen Regelkreis statt, d. h. ein Servoantrieb besteht aus einem Motor mit dazugehörendem elektronischem Steuergerät, dem Servoregler.
Servomotoren können in Sekundenbruchteilen auf ihre Nenndrehzahl beschleunigen oder abbremsen und lassen sich daher als hochdynamische Antriebe zur Regelung von Winkeln, Lagen und Wegen einsetzen.
Bürstenlose Servomotoren sind entweder Gleichstrom-Motoren, Drehstrom-Asynchronmotoren oder Drehstrom-Synchronmotoren. Der größte Unterschied zu bürstenbehafteten Motoren liegt in ihrem inneren Aufbau; hier bildet die Wicklung den Stator und die Permanentmagnete bzw. ein Eisenkern (Asynchronmotor) den Rotor des Motors. Durch den Wegfall der Kohlenbürsten vergrößern sich außerdem die Wartungsinterwalle für den Motor deutlich.
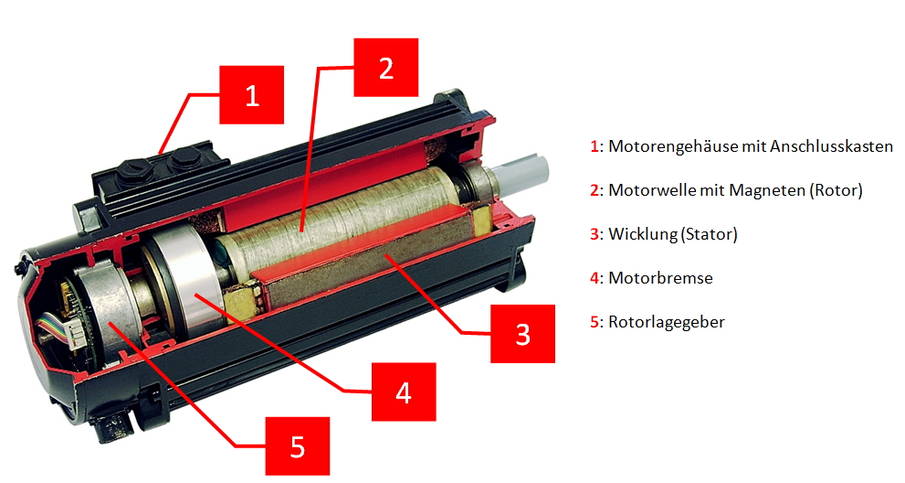 Abbildung 1: Schnittmodell eines bürstenlosen Servomotors (Mattke AG, Freiburg)
Abbildung 1: Schnittmodell eines bürstenlosen Servomotors (Mattke AG, Freiburg)Bürstenloser Gleichstrommotor
Der bürstenlose Gleichstrommotor ist ein elektronisch kommutierter Motor, dessen Aufbau mit Ausnahme der Wicklung dem des Drehstrom-Synchronmotors entspricht. Er hat drei oder mehr Wicklungsstränge. Die Kommutierung erfolgt über Resolver oder Rotorlagegeber. Der Leistungsbereich dieser Motoren liegt üblicherweise zwischen 0,3kW bis 30kW. Das Drehmoment des Motors ist vom Strom abhängig, die Drehzahl von der Umschaltfrequenz der Kommutierungseinrichtung.
Der Drehstrom-Asynchronmotor ist am einfachsten im Aufbau. Jedoch benötigt er für eine Lage-bzw. Drehzahlregelung den größten elektronischen Aufwand. Drehstrom-Asynchronmotoren liegen im Leistungsbereich von 0,3kW bei n = 3000min-1 bis ca. 100kW bei n = 1500min-1.
Der bürstenlose Drehstrom-Synchronmotor enthält eine dreisträngige Statorwicklung und einen permanenterregten Rotor. Im Gegensatz zu einem elektronisch kommutierten Gleichstrommotor dient hier die Wicklung zur Erzeugung eines Drehfeldes. Daher kann dieser Motor mit annähernd sinusförmigem Drehstrom betrieben werden. Der Leistungsbereich dieser Motoren liegt von 0,2kW bei n = 4000min-1 bis ca. 50kW bei n = 2000min-1.
Magnetwerkstoffe
Außer den Drehstrom-Asynchronmotoren sind die bürstenlosen Servomotoren üblicherweise mit Permanentmagneten bestückt, die konstruktiv vor Entmagnetisierung geschützt werden müssen. Gängige Magnetwerkstoffe sind Samarium-Kobalt, Neodym-Eisen-Bor, Aluminium-Nickel-Kobalt und Hartferrit.
Servoregler
Als Servoregler bezeichnet man die zur Drehzahl- und Drehmomentenregelung von Servomotoren erforderlichen leistungselektronischen Stellglieder, die ein in der Frequenz steuerbares dreiphasiges Wechselspannungssystem bereitstellen können. Der Servoregler bildet das Bindeglied zwischen der Steuerung und dem Servomotor. Seine Aufgabe ist es, das „schwache“ Referenzsignal der Steuerung in ein leistungsstarkes Signal für den Servomotor umzuwandeln. Für bürstenlose Servomotoren werden heute fast nur noch digitale Servoregler eingesetzt, die viele neue Funktionen im Vergleich zu den lange Zeit üblichen Analogreglern bieten. Sie führen mit Hilfe von komplexen und leistungsfähigen Technologiefunktionen wie z. B. Winkelsynchronlauf, elektronische Kurvenscheibe, oder Momentenregelung wichtige Maschinenfunktionen aus, die in der Vergangenheit über mechanische Lösungen realisiert wurden 1).
Neben den Servoreglern, die zentral im Schaltschrank einer Maschine untergebracht sind, gibt es gerade für kleinere Servoantriebe im Drehmomentbereich bis 2Nm sehr kompakte, dezentrale Regler, die im Motorengehäuse untergebracht werden können, für größere Servoantriebe bis ca. 8Nm werden die Regler auch auf dem Motorengehäuse angebracht.
1) Vgl. Wikipedia
 Abbildung 2: Digitale Regler für bürstenlose Servomotoren (Mattke AG, Freiburg)
Abbildung 2: Digitale Regler für bürstenlose Servomotoren (Mattke AG, Freiburg) Abbildung 3: Bürstenloser Servomotor mit integriertem Regler (Mattke AG, Freiburg)
Abbildung 3: Bürstenloser Servomotor mit integriertem Regler (Mattke AG, Freiburg)Gebersysteme
Servoantriebe in der Regel mit im Motorengehäuse integrierten Lagegebern betrieben. Bei bürstenlosen Servomotoren handelt es sich dabei um Resolver, Inkrementalgeber oder SinCos-Geber.
Resolver
Der Resolver ähnelt in seinem Aufbau einem kleinen Elektromotor mit Präzisionswicklung. Der Stator trägt zwei Wicklungsgruppen, deren Wicklungsebenen senkrecht aufeinander stehen. Der Rotor trägt eine Wicklung, an der man eine induzierte Spannung messen kann.
Speist man die Statorwicklungen mit einer Wechselspannung URef von fRef ca. 4 kHz, dann misst man die im Rotor induzierte Spannung UR und ermittelt hieraus die Phasenverschiebung Phi der Rotorspannung gegenüber der Referenzspannung. Die Phasenverschiebung entspricht dem Verdrehwinkel der Rotorwicklung gegenüber der Statorwicklung.
Aus der Phasenverschiebung zwischen uR(t) und uS1(t) lässt sich der Verdrehwinkel Phi der Rotorwicklung gegenüber der Statorwicklung ermitteln. 2)
Inkrementalgeber
Die digitalen Geber auf optoelektronischer Basis arbeiten in der Regel nach dem Durchlichtverfahren, teilweise aber auch nach dem Reflexionsverfahren.
Das inkrementale Messverfahren benutzt als Maßverkörperung einen Tragkörper aus Glas, auf dem eine Gitterteilung aus undurchlässigen Strichen und lichtdurchlässigen Lücken aufgebracht ist. Anwendung finden Inkrementalgeber mit 512 bis 16384 Strichen je Umdrehung (seltener auch 500 und 1000 Striche). Die um Delta alpha versetzten Striche (Fenster) werden von zwei optoelektronischen Sensoren, die um Delta alpha /4 versetzt sind, abgetastet.2)
Sinus-Cosinus-Geber
Das Sin-Cos-Geber-System ist eine Mischung aus Inkrementalgeber und Absolutwertgeber. Der Absolutwert wird hierbei zunächst nur beim Einschalten des Gerätes gebildet und über eine RS-485-Schnittstelle einem externen Zähler mitgeteilt, der dann von diesem Absolutwert aus inkremental mit der analogen Sinus/Cosinus-Schnittstelle weiterzählt. Damit eine hohe Auflösung auch bei großen Drehzahlen möglich ist, wird das Inkrementalgebersignal nicht wie üblich in digitalen Werten, sondern als analoge Sinus/Cosinus-Spannung übertragen. Üblich sind Periodenzahlen von 512 oder 1024 pro Umdrehung. Sinus-Cosinus-Geber sind als Singleturn- als auch als Multiturngeber mit einer zusätzlichen Erfassung von 4096 Umdrehungen verfügbar. 2)
2) Vgl. G. Schenke, Mechatronik
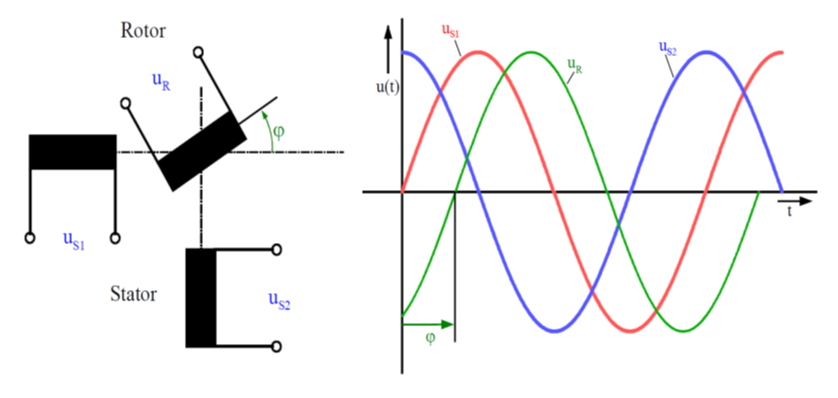 Abbildung 4: Funktionsweise eines Resolvers / Phasenauswertung bei Speisung der Statorwicklung (G. Schenke, Mechatronik)
Abbildung 4: Funktionsweise eines Resolvers / Phasenauswertung bei Speisung der Statorwicklung (G. Schenke, Mechatronik)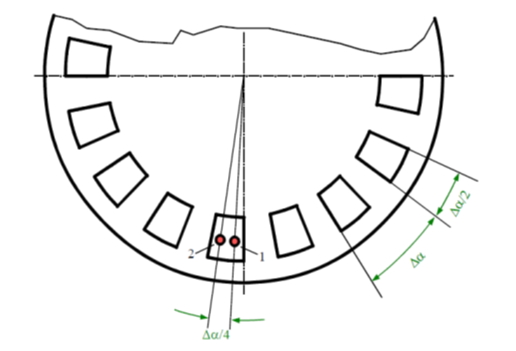 Abbildung 5: Prinzip eines Inkrementalgebers (G. Schenke, Mechatronik)
Abbildung 5: Prinzip eines Inkrementalgebers (G. Schenke, Mechatronik)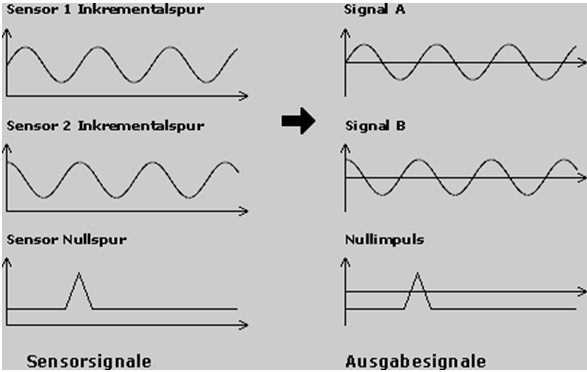 Abbildung 6: Signalverlauf eines Sinus-Cosinus-Gebers (servotechnik.de)
Abbildung 6: Signalverlauf eines Sinus-Cosinus-Gebers (servotechnik.de)Anwendungsgebiete für bürstenlose Servomotoren
Anwendungsgebiete für bürstenlose Servomotoren finden sich im Maschinenbau in Handhabungs-und Transportanlagen, Industrierobotern, Verpackungs-und Druckmaschinen sowie als Vorschubantrieb in numerisch gesteuerten Werkzeugmaschinen. In allen Bereichen sind Eigenschaften wie sehr hohe Dynamik, gute Positionierbarkeit, hohe Überlastbarkeit sowie hohe Drehzahlsteifigkeit Vorteile von Servomotoren gegenüber anderen Antrieben.
